












UTARI Research Assistant, Twinkle Kothari, Received Judges’ Choice Award at the College of Engineering Innovation Day
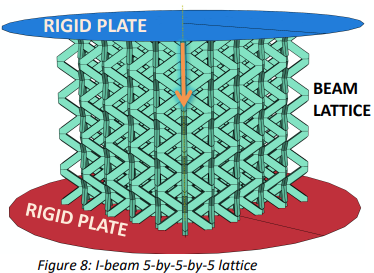
Twinkle Kothari, a PhD student in Mechanical and Aerospace Engineering and UTARI Research Assistant was honored with the Mechanical and Aerospace Engineering. Her project, “Design and Analysis of Reinforced I-Beam Lattice with Enhanced Energy Absorption” aims to enhance the stiffness, yield strength, and energy absorption capabilities of beam lattices. The…

