Using a new field of applied mathematics, a UT Arlington computer scientist hopes to enhance the perception capabilities of robots.
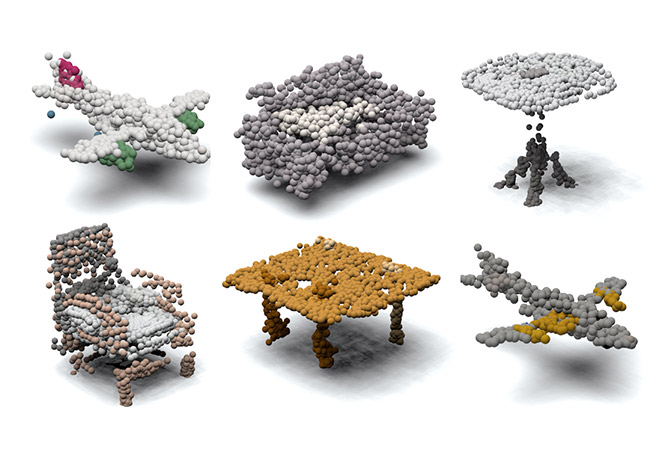
Assistant Professor William Beksi is investigating how to effectively process 3D point cloud data captured from low-cost sensors, which robots could then use to facilitate intelligent tasks in complex scenarios. To do so, he will use topological data analysis, a new field of applied mathematics that provides tools for extracting topological features from data. The main tool, persistent homology, will allow him to study features such as connected components, holes, and voids at multiple scales.
To do so, he will use topological data analysis, a new field of applied mathematics.
Dr. Beksi’s research will investigate how the incorporation of topological features can yield unique insight into the structure of point cloud data that is not obtainable from other methods.
“As 3D-sensor technology becomes pervasive in robotics, modern approaches to process and use this data in innovative and meaningful ways have not kept up,” he explains. “The idea is to develop new algorithms for processing large-scale 3D point clouds that overcome current limitations and lead to advances in robotic perception.”